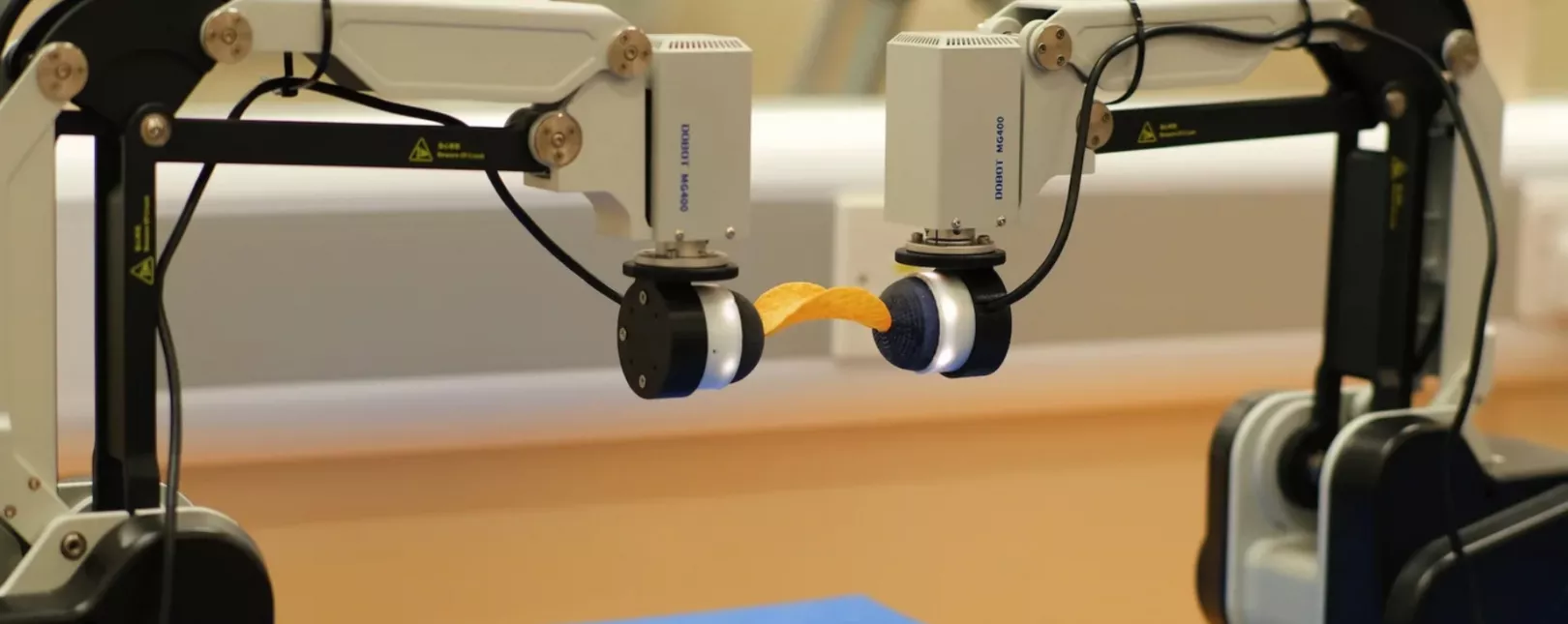
A bimanuláis robot nagy pontossággal reagál a valós idejű tapintásból származó visszajelzésre, így képes felvenni a Pringles chipseket anélkül, hogy eltörné azokat.
A Bristoli Egyetem Bristol Robotics Laboratóriumának kutatói az IEEE Robotics and Automation Letters oldalán augusztus 23-án közzétett új cikkben részletezték új „Bi-Touch”-rendszerüket. Az áttekintésben a csapat kiemelte, hogyan irányítja mesterséges intelligencia a robot végtagjait, hogy az „váratlan zavarok esetén is megoldja a feladatokat, és a kényes tárgyakat kíméletes módon manipulálja”.
A fejlesztést ígéretessé teszi, hogy a robot két karból áll, szemben az általában jellemző egykarú robotokkal. A végtagok számának megduplázódása ellenére a betanítás csak néhány órát vesz igénybe. Ennek elérése érdekében a kutatók először egy szimulációs környezetben képezik ki mesterséges intelligenciájukat, majd a véglegesített Bi-Touch-rendszert alkalmazzák fizikai robotkarjaikra.„Bi-Touch-rendszerünkkel könnyedén megtaníthatjuk az AI-ügynököket egy virtuális világban néhány órán belül az érintésre szabott bimanuális feladatok ellátására” – írja Yijiong Lin mérnök professzor a közleményben. A Bi-Touch-rendszer sikere a Deep Reforcement Learning (Deep-RL) módszernek köszönhető, amely során a robotok bőségesen kísérleteznek a feladatok végrehajtásával, és így hibáznak is szép számmal. Siker esetén a kutatók „jutalmat” adnak a mesterséges intelligencia számára, így idővel az megtanulja a jutalmazott, legjobb lépéseket, hogy elérje a kitűzött célt. A csapat azt reméli, hogy az új Bi-Touch-rendszerüket egy napon bevethetik az olyan iparágakban, mint a gyümölcsszedés, a háztartási szolgáltatások vagy akár a mesterséges végtagok esetében.
Forrás: Popsci.com
A cikk eredetileg a GyártásTrend szeptemberi számában jelent meg, amely ezen a linken olvasható.
