
Az amerikai Southwest Research Institute (SwRI) kutatói olyan kameraalapú autonóm vezetési eszközöket fejlesztettek ki, amelyek a LIDAR-hoz és RADAR-hoz hasonló technológiák bevetése nélkül is működhetnek. A technológia kitűnő lopakodó képességeket biztosíthat a hadsereg számára, miközben az önvezetésben, az űrben és a mezőgazdaságban is alkalmazásra találhat.
A modern autonóm vezetési megoldások nagymértékben támaszkodnak a fényérzékelő és távolságmérő (LIDAR) érzékelőkre a jármű körüli objektumok megjelenítéséhez. A beérkező adatok alapján a szoftveres megoldás azonosítja a közelben lévő tárgyakat, és segít a jármű számítógépének eldönteni, hogy megálljon vagy lassítson. A vizualizációt minden irányba küldött nagyenergiájú lézerek teszik lehetővé, amelyekkel meghatározható a különböző objektumok mélysége és távolsága.
Bár ez a technológia a polgári közlekedésben is működhet, a LIDAR-érzékelők fénye könnyen észlelhető. Ez könnyen kompromittálhatja az egység helyzetét, ha katonai járműveken használják. Hasonlóképpen a rádióhullámokat használó RADAR-technológia is könnyen észlelhető, és a műholdakat használó globális helymeghatározó rendszer (GPS) is blokkolható.
A SwRI kutatói ezért fejlesztették ki a Vision for Off-Road Autonomy (VORA) eszköztárat, amely a tárgyak passzív észlelésére, a környezeti modellek létrehozására és az egységek térképen történő lokalizálására szolgál. A rendszert a LIDAR alternatívájaként képzelik el, hiszen a kamerák működés közben nem bocsátanak ki fény- vagy lézerjeleket. A csapatnak azonban új szoftvert kellett kifejlesztenie ahhoz, hogy a kameraadatokat a rendszerint LIDAR-ral megvalósított nagy pontosságú feladatok elvégzéséhez felhasználhassa.
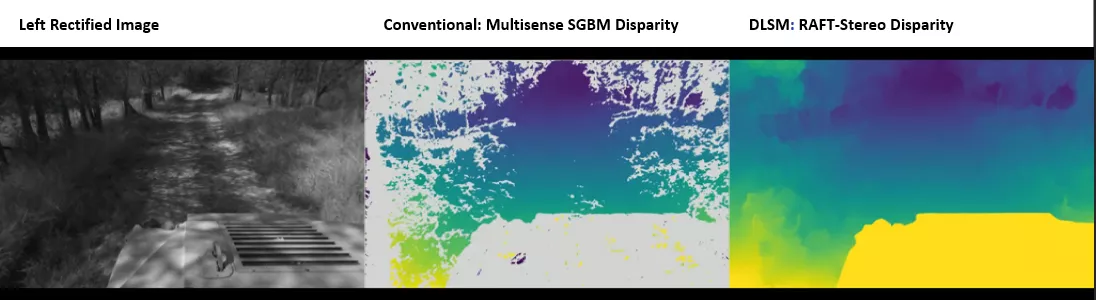
A kutatók kifejlesztettek egy mélytanuló sztereó illesztőprogramot, amely a kameraadatok felhasználásával térképeket hoz létre. Az eszköz a mozgás közötti különbségeket használja fel a nagy pontosságú térképek létrehozásához. A kutatók egy faktorgráf algoritmust is kifejlesztettek a sztereóképek és a tereptárgyak ritka adatainak, valamint az inerciális mérőegység leolvasásainak kombinálására, hogy lokalizációs adatokat szolgáltassanak.
A projektet eredetileg katonai alkalmazásnak tervezték. Ahogy azonban a VORA képességei előtérbe kerültek, a kutatók rájöttek, hogy az eszközök alkalmazási lehetőségei messze túlmutatnak a lehetőségein. A VORA például megreformálhatja az autonóm járművek energiaellátását, hiszen egy kameraalapú rendszer sokkal energiatakarékosabb. Hasonlóképpen, a GPS-jelek nehezen érhetők el nehéz terepen, például kanyonokban és hegyoldalakon. Egy kameraalapú autonóm vezetési rendszer ezekben a régiókban is segíthetné például a mezőgazdaság automatizálását. Az SwRI tervezi, hogy a VORA-t más autonóm rendszerekbe integrálja, és széles körűen teszteli a San Antonióban található tesztpályán.
Forrás: Interesting Engineering
A borítókép illusztráció, forrás: Adobe Stock
