
Az önvezető autó, a drón, a fűnyíró robot és az ipari automatizáció új hulláma kinyitja a kutatások spektrumát, lendületet ad azoknak, és ösztönzi a k+f-fejlesztéseket. Vagyis egy merőben új és formálódó tudományban számtalan új trend és fejlesztési irány írja a robotika jövőjének történetét. Hogy átlássuk a terület legnagyobb kérdéseit, a robotika jövőt formáló újdonságait, dr. Galambos Pétert, a Bejczy Antal iRobottechnikai Központ (BARK) vezetőjét kértük meg, hogy segítsen ezekben eligazodni.

„A humanoid robotok, ha lemerülnek, egyszerűen eldőlnek” – mondja tréfásan Galambos Péter arra vonatkozóan, hogy az akkumulátortechnológia jelenlegi fejlettsége az egyik korlátja annak, hogy emberi formátumú robotok szaladgáljanak a nappalinkban. Az ilyen nagy energiaigényű robotokat hatékonyan kis helyet igénylő, de nagy üzemidejű akkumulátorok segítségével lehet működtetni, amire a mai technológia még nem ad megfelelő megoldást. A szakember szerint sokkal valószínűbb az, hogy a mezőgazdaság és a zöldség-gyümölcs termesztés területét lepik el a következő tíz évben a robotok. „Rövid távon várható komoly eredmény a terménybetakarítás terén, például a különböző gyümölcsszedő robotok elterjedésére számítok. Az eper, a málna betakarításában, a gombatermesztésben ez hozhat áttörést.” Galambos Péter szerint az intelligens mezőgazdasági gépek térhódítása a szántóföldi növénytermesztést érinti legszembetűnőbb módon, a gazdasági környezet sajátosságai miatt a nyugat-európai országokban és Amerikában jelenhetnek meg elsőként közel teljesen automatizált formában. Az önműködő mezőgazdasági járművek, traktorok, kombájnok, illetve a szántóföldek állapotát feltérképező műholdak és beavatkozásra is képes intelligens drónok lesznek a jövő mezőgazdászai.
RoBUTCHER, a robothentes
Az Óbudai Egyetem is tagja annak a konzorciális európai kutatási projektnek, amely a vágóhídi sertésfeldolgozás területét kívánja automatizálni egy robothentes (RoBUTCHER) segítségével. A hentesek munkáját kiváltó teljesen automatizált, illetve skálázható feldolgozócellák a nagy beruházási igényű vágóhidak létesítését is kiválthatják, cellánként bővíthetők, és alkalmasak arra is, hogy egy kisebb közösség igényeit elégítsék ki.
Van-e élet a robotporszívón túl?
Dr. Galambos Péter az Óbudai Egyetem kutatójaként 2007-ben Japánban, a Toshibánál vett részt háztartási robotok fejlesztésében, de ezek az innovációk máig sem tudtak elterjedni. Az egy időben látványos eredményekkel kecsegtető Ambient Assisted Living- (a felhasználót körülvevő életvitelt támogató technológia) kutatások – amely a betegek, idősek életminőségének javítására létrehozott komplex asszisztenciarendszerek kidolgozását célozzák – sem hoztak valódi áttörést, ezért ezek nem, vagy csak korlátozottan jelentek meg a piacon. A kereskedelmi forgalmazáshoz ugyanis garanciákat kell vállalnia a gyártónak, hogy a robot minden lakókörnyezetben működik, csakhogy erre jelenleg még nem alkalmasak. Ezekhez a tevékenységekhez a robotok nem rendelkeznek megfelelő percepciós és kognitív képességekkel. Az akadály tehát nem elsősorban mechatronikai, vagyis a jövőben a robotok intelligenciafejlesztése a fő cél a szakember szerint.

Laborautomatizálás az Óbudai Egyetemen
Robotok egészségügyi célú felhasználásán dolgoznak az Óbudai Egyetem kutatói, akik patológiás tárgylemezek, szövettani metszetek archívumának kezelését automatizálják. Komoly problémát jelent az átlátszó üveglapok robotok általi felismerése és mozgatása, amiben a gépi tanulás segítségét veszik igénybe. A robot kamerák segítségével készít képeket, amit neurális hálózatok és hagyományos képfeldolgozási algoritmusok dolgoznak fel az egyes tárgyak felismerése és a tárgyak helyzetének pontos meghatározása céljából.
Robotikai megoldások az egészségügyben
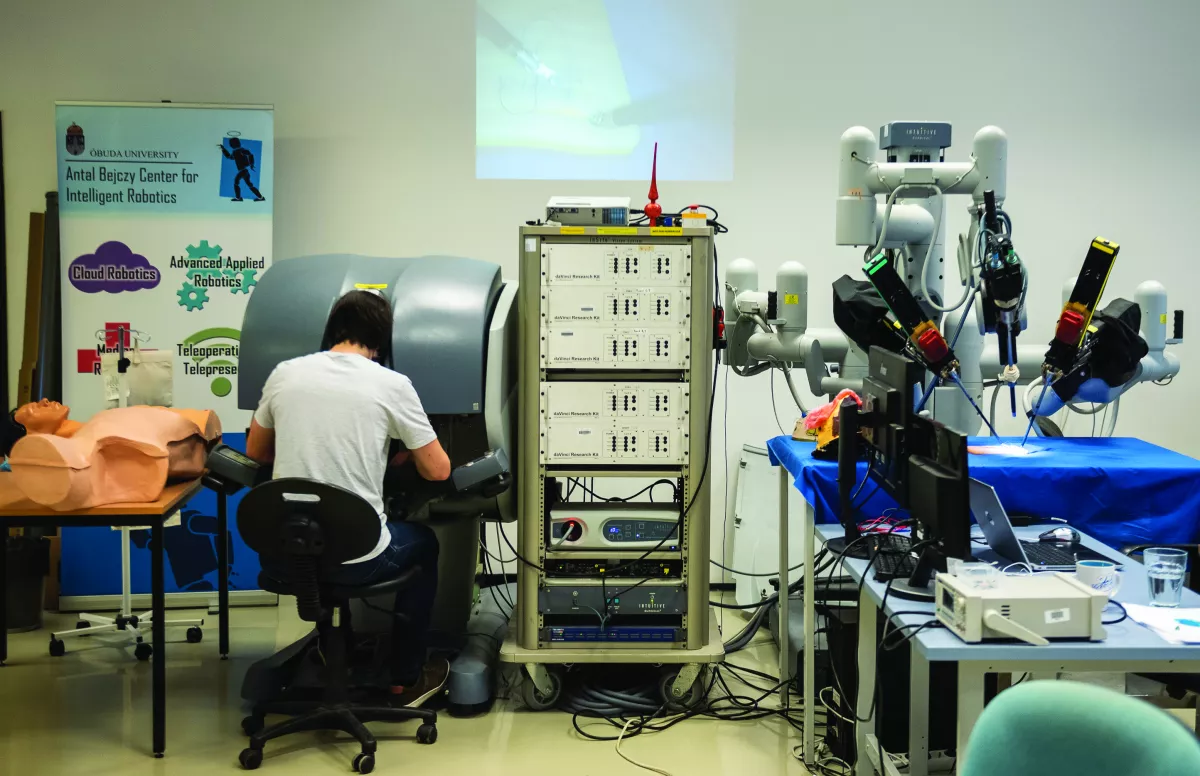
Az egészségügy robotizálásában is gyors fejlődés figyelhető meg. A robotsebészet már több mint 20 éve realitás, a Da Vinci robotok segítségével már tavaly óta itthon is három intézményben végeznek robottal támogatott műtéteket. Emellett speciális ideg- és ortopéd sebészeti robotok is működnek már a világban. A Kiberkés (CyberKnife) pedig célzott besugárzást, azaz a daganat precíziós, célzott sugárkezelését tudja elvégezni például az Országos Onkológiai Intézet páciensei számára is. „Az orvosi beavatkozások világa azért jó terepe a robotizálásnak, mert szemben a háztartási robotikával, a komplexitás sokkal jobban körülírható, jól behatárolhatók a műveleti elemek és azok a körülmények, amelyekre számítani kell. A másik fontos különbség, hogy itt zömében az ember által irányított műveletekről van szó, hiszen a robot még nem önállóan operál” – fogalmaz Galambos Péter. Az egészségügyi robotok szabadsága azonban komoly dilemma. A robotsebészetben is alkalmazható az önvezető autóknál kidolgozott ötfokú skála, de míg az autók szériagyártása a hármas szintnél áll, a robotsebészetben az egyes szintről lassan haladunk a kettes szint felé. A szakember szerint sok kutatás, k+f-projekt fókuszál most a gépi érzékelés fejlesztésére és a gépi döntéshozásra. A kihívás az, hogy a robotnak is abból a képből, képi információból kell dolgoznia, mint ami az orvos rendelkezésére áll például endoszkópos sztereó kameraképek formájában.
A mesterséges intelligencia, a gépi tanulás szerepe a robotsebészetben is kiemelt fontosságú a szakértő szerint. Az egyik fejlesztési irány, hogy a jól körülhatárolható műveleti elemeket fantomkörnyezetben, gyakorló modelleken, valósághű, szintetikus és akár virtuális digitális „próbababákon” valódi sebészek gyakorolják, majd az összegyűjtött adatokat mesterségesintelligencia-módszerek tanítására használják fel. „A mesterséges intelligencia feladata többe között, hogy a sebészeti eszközt meg tudja különböztetni a környezettől az operációk képanyagában. Ehhez nagyon sok jó minőségű adatra, jelen esetben felcímkézett képek sokaságára van szükség. A szintetikus környezetben digitálisan készített képi adatok jelentősége hasonlóan nagy más területeken is. Sikeresen alkalmazzuk a módszert a gombatermesztés robotizálását célzó projektben is a gombák automatikus felismerését végző neuronhálók tanítására, vagy a számos ipari területen megjelenő „bin-picking” rendszerek megvalósítására” – teszi hozzá Galambos Péter.
Merre tart a robotika?
A csomaglogisztika, csomagszállítás ideális terep lehet a robotika számára, a megfogószerkezetek mechatronikai adottságai már elég fejlettek – például létezik ötujjas robotkéz –, de az azt vezérlő szoftveroldal még nem képes azt igazán jól működtetni. Ezen a területen a szakember szerint a következő években szintén komoly fejlődés várható. „Jelentős áttörést várok a képi modalitás, a robotok látásalapú intelligenciájának terén is” – fogalmaz Galambos Péter. Míg az ember két szemmel képes a tájékozódásra, az autók számtalan kamerájuk, radarjuk, lidarjuk, ultrahangos érzékelőjük ellenére is nagyon limitáltan képesek autonóm működésre. A szakember olyan fordulatra számít az ipari robotikában, amely az intelligens látásnak köszönhetően, alapvetően kameraképekre támaszkodva valósítja meg az igazán hasznos képességeket.
Szerző: Myat Kornél
Az interjú a Robotech 2022-es kiadványban jelent meg, amely ezen a linken olvasható.
